
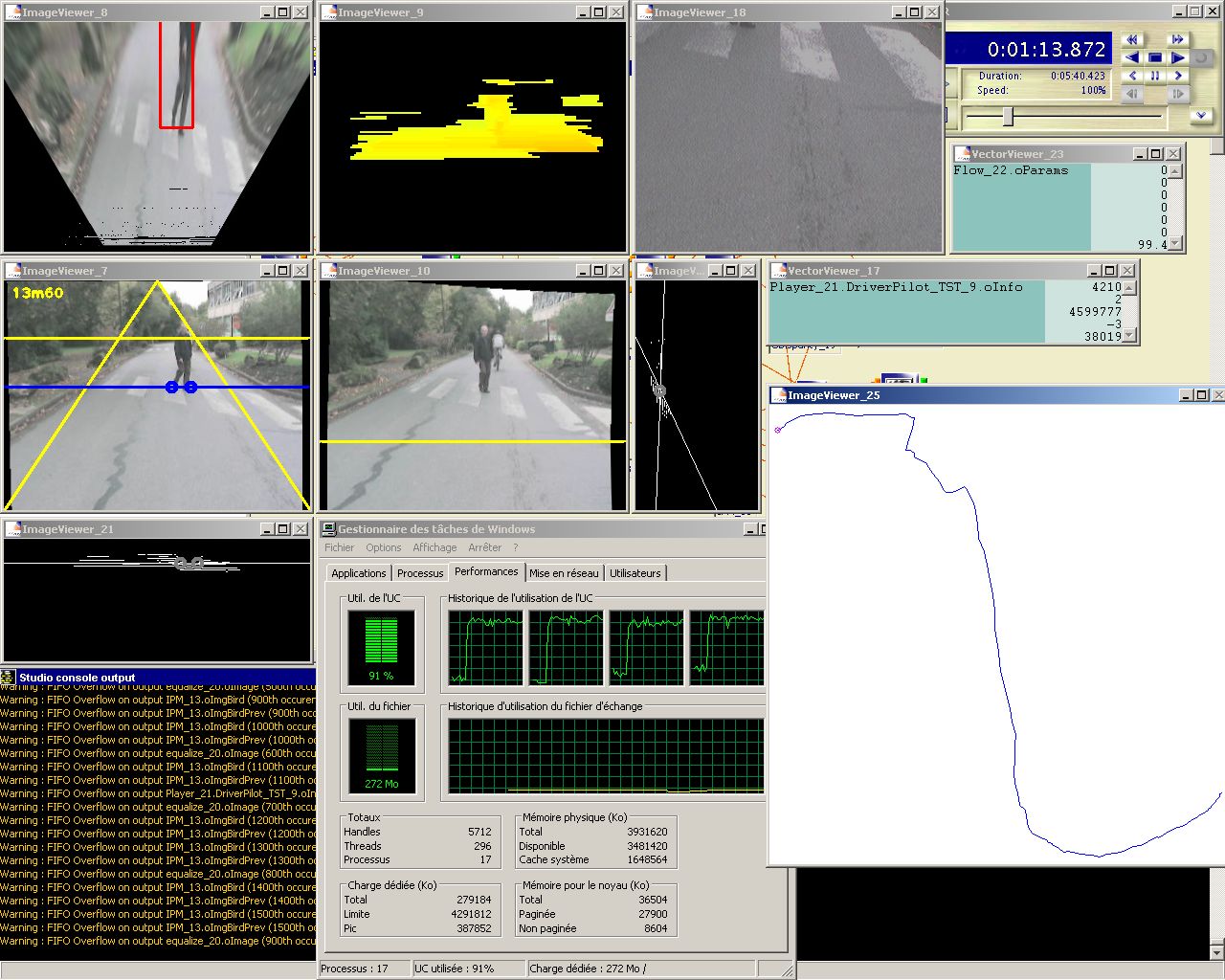
 Séquence
PICAR disparité dense Séquence
PICAR disparité denseDe
gauche à droite et de haut en bas, les fenêtres sont
- l'image de la
caméra gauche en vue "de dessus" (Bird Eye
View), avec une zone rouge qui délimite l'obstacle. La
transformation d'image est une inversion de la projection du plan de la
route sur le plan image.
- l'image de disparité stéréoscopique (Bellman). Les couleurs chaudes (rouge) indiquent la proximité, et froides l'éloignement (bleu). - la troisième caméra très inclinée, qui vise bas le bord de route. - les paramètres extéroceptifs du mouvement de la caméra, 3 rotations et 3 translations, ainsi que la détermination qualitative. - l'image de la caméra gauche rectifiée avec l'horizon à une hauteur 70 dans l'image, ainsi que les limites arbitraires de la voie de circulation (jaunes). La ligne bleue détecte le contact sol/obstacle. - l'image de la caméra droite rectifiée, avec une droite jaune à 5m. - l'image de V-disparité seuillée, dans laquelle on a détecté la position de l'obstacle par une ligne verticale. L'équation de la route dans le plan V-disparité est représentée par une ligne oblique qui fait un angle de 65° par rapport à l'horizontale dû à l'inclinaison de la caméra (tilt). La transformée de la route coupe "V" à la hauteur de l'horizon. L'intersection des droites, ordonnée de la ligne bleue, est représentée par un cercle gris (obstacle). - les paramètres datés qui remontent des capteurs proprioceptifs. - l'image de U-disparité seuillée permettant la détection latérale. - la reconstruction de la trajectoire de PICAR, obtenue avec les paramètres extéroceptifs du mouvement. |
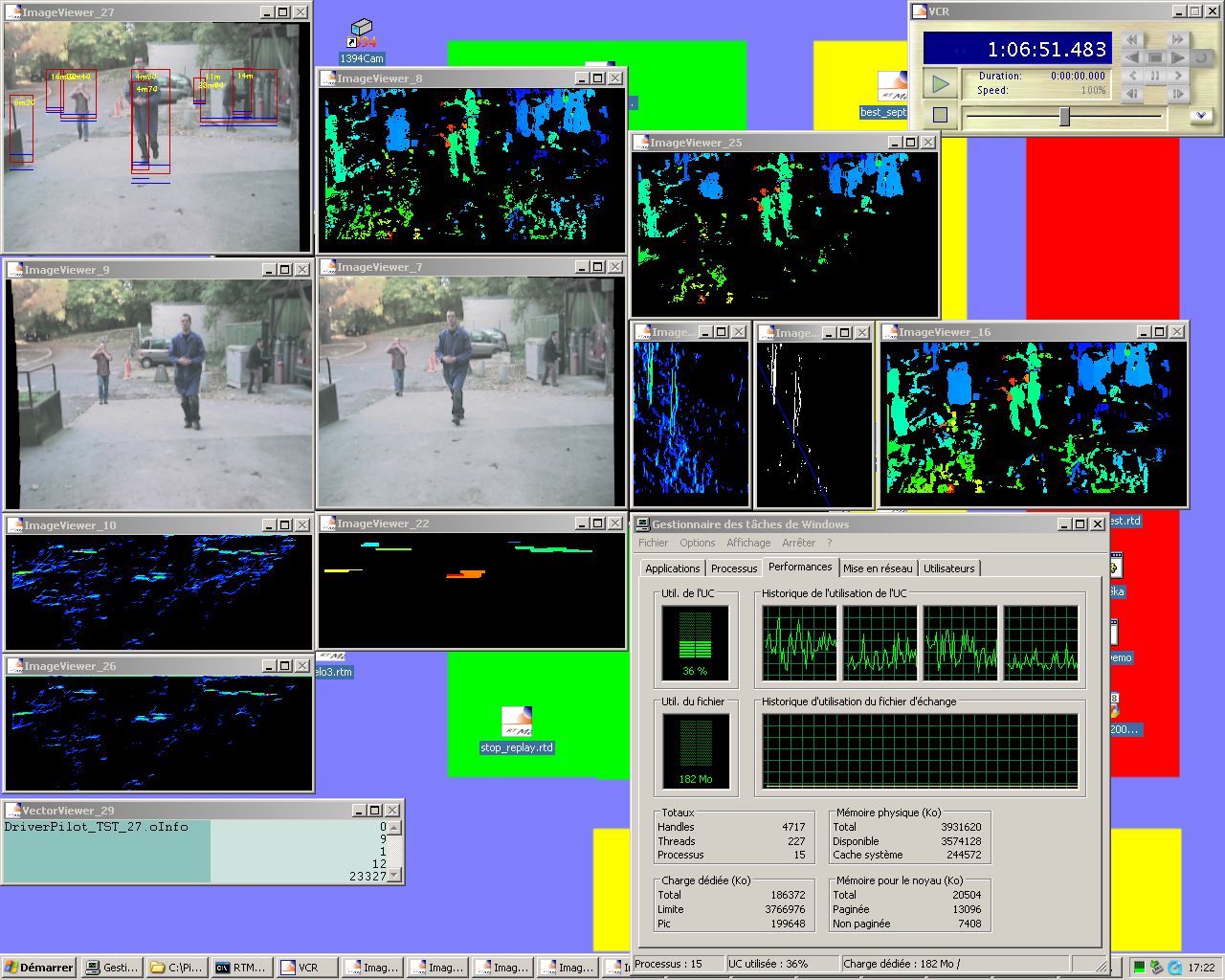
Séquence
PICAR disparité éparse De
gauche à droite et de haut en bas, les fenêtres sont
- l'image du
résultat de détection des obstacles,
délimités par des
rectangles englobants en rouge. Les dimensions des rectangles sont
variables en largeur et hauteur, fonction du volume des obstacles.
Chaque boite contient une inscription qui correspond à sa
distance.
Des barres bleues délimitent l'incertitude sur la base de sa
position.
- la disparité éparse réalisée par la méthode de "block matching" - une deuxième image de disparité similaire à la précédente. - la perception de la caméra gauche, rectifiée avec le calibrage OpenCV. - la perception de la caméra droite, rectifiée avec le calibrage OpenCV. - l'image de V-disparité qui correspond à la cartographie éparse. - l'extraction d'obstacles dans le plan V-disparité et la détermination dynamique de l'équation du plan de la route (droite bleue). - la disparité dense réalisée par la méthode de "block matching". - l'image de la U-disparité déduite par la méthode corrélative. - l'extraction des segments de disparité constante par U-connexité, qui permet la localisation latérale des obstacles. - l'image de la U-disparité filtrée pour la méthode corrélative. - les paramètres datés qui remontent des capteurs proprioceptifs. |
 |
 |

