 Vue de l'extérieur. |
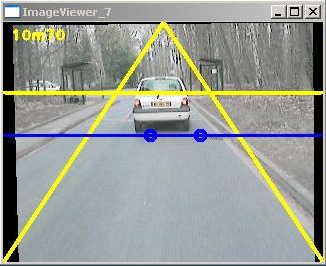 Vue gauche
rectifiée : la zone de détection des obstacles est
délimitée par l'horizon (déterminé par
calibrage à une hauteur de 60 pixels dans la vue), et des
droites arbitraires pour la voie de circulation, en jaune. La droite
bleue est déterminée par un traitement adapté et
indique le contact chaussée-obstacle. Les cercles bleus
donnent la position latérale de l'obstacle.
|
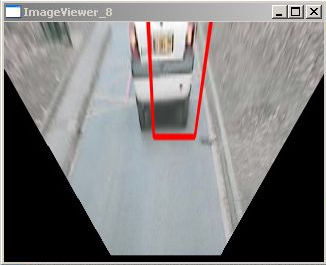
 Vue droite rectifiée avec une droite représentant la distance de 5 mètres à l'avant, ainsi que le décalage latéral du bord de la route. |
 Vue de dessus (bird view) avec une fenêtre de poursuite (obtenue par U et V - disparité) : cette vue est générée par une projection inverse de la vue gauche, la trajectoire (le cap) est déduite par un calcul sur de la vue de droite. |
 Données proprioceptives. |
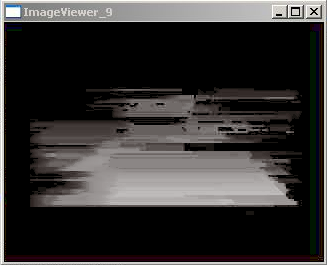 Disparité stéréoscopique (3ème dimension) correspondant à la vue gauche. |
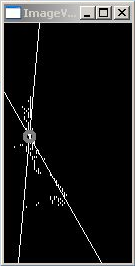 |
 V- (gauche) et
U- (droite) disparités : l'image est seuillée pour
obtenir une détection robuste. Gauche : dans ce plan (profondeur
x ordonnée) la droite verticale est le résultat de la
transformée de Hough (obstacle) l'autre droite de construction
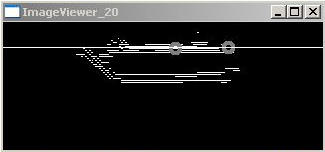
représente la projection du plan de la route. Droite : dans ce
plan (abscisse x profondeur) le segment horizontal de droite
délimite le position latérale de l'obstacle par une autre
transformée de Hough, la droite de construction correspond
à la profondeur de l'obstacle. |
