

Présentation générale du contenu vidéo de la démonstration.
PiCar
vision system is built with several components
implemented in a real time stamped data flow RTMaps
environment. The whole image processing results is
grouped in a « Bird View »
window [LeC05]
including obstacle detection and road way tracking.
The view is an inversed road plane perspective
reconstructed with a bilinear interpolation of images.
This allows us to represent the vehicle and its
environment in a non projective rectified world. The
computing is done over proprioceptive (gyros,
odometers ...) and exteroceptive (cameras, GPS ...)
sensors. Most of image layer
processing is performed using the OpenCV 2 library [Open02]. The
stereoscopic disparity map that is addressed herein,
is measured via epipolar rectified images [Zha00]. It is
restricted to a Region Of Interest (ROI) that is
limited below the horizon, above a 3 meters blind zone
and within the relevant road way. That restricts the
computation of disparities to a trapezes that delimits
the forward vehicle's trajectory.
The
driving direction is determined with no need of line
marks, thanks to IPM [Ber98] (Inverse Perspective
Mapping) and a Hough transform that votes for road's
border transition. The obstacles are detected
longitudinally and laterally in U and V-disparity dual
projection spaces [Lab04],
knowing the slope of cameras to the ground plane and
the image height of the horizon. A calibration measure
is required to associate the height in the images,
related via an hyperbolic relation to longitudinal
distances in the real world.
References :
[LeC05]
François LE COAT, Yves LAYOUS,
« Localisation
Dynamique
Visuelle
pour
le
positionnement
aérien
d’un
drône » READ Workshop at INT
Évry, France, 1, 2, 3 June 2005.
[Open02] <http://opencvlibrary.sf.net/>
[Zha00]
Zhengyou ZHANG
« A
flexible
new
technique
for
camera
calibration »
IEEE
Transactions
on
Pattern
Analysis
and
Machine
Intelligence,
22(11):1330-1334,
2000.
[Ber98]
Massimo BERTOZZI,
Alberto BROGGI,
Alessandra FASCIOLI,
« Stereo Inverse Perspective Mapping: Theory and Applications »
Image
and
Vision
Computing
Journal,
16(8):585-590,
June
1998.
[Lab04]
Raphaël
Labayrade,
Didier
Aubert,
« Robust
and
fast
stereovision
based
obstacles
detection
for
driving
safety
assistance »
Special
Issue
on
Machine
Vision
Applications
at
the
IEICE
Japanese
journal,
Jan.
2004.
|
|
|
|
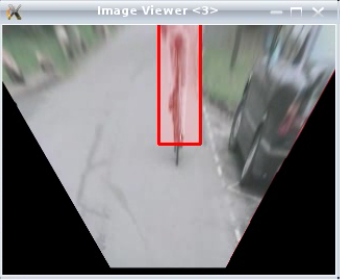
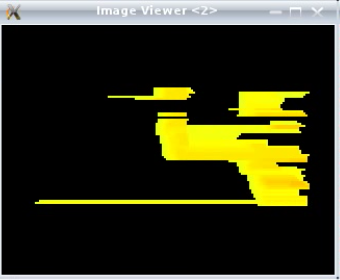
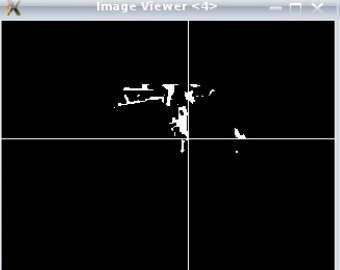
| (1) Image de la caméra gauche en vue "de dessus" (bird view), avec une zone rouge qui délimite l'obstacle. La transformation d'image est une inversion de la projection du plan de la route. | (2) Image de disparité stéréoscopique (Bellman dérécursivé). | (3) Vue "de dessus" synthétique qui correspond à l'inversion de la projection du plan de la route sur le plan image. I.e. la bird-view. Cette vue de la troisième caméra permet la détermination de trajectoire. En sur-impression apparait de flot de mouvement implicite, correspondant à la transformation affine du plan image, approximée entre T-1 et T. | |
|
|
|
|
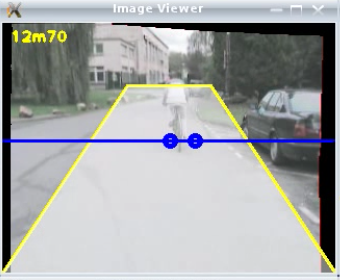
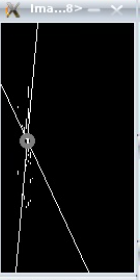
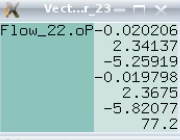
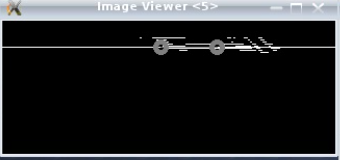
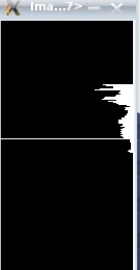
| (4) Image de la caméra gauche rectifiée avec l'horizon à une hauteur 60 dans l'image, ainsi que les limites arbitraires de la voie de circulation (jaunes). La ligne bleue détecte le contact sol/obstacle. Son ordonnée dans l'image est inversement proportionnelle à la distance. L'obstacle potentiel est détecté et sa distance est reportée en mètres. | (5) Image de la caméra droite rectifiée dans laquelle on détecte le bord de route par la méthode IPM. La droite horizontale jaune est à 5 mètres depuis l'avant de PICAR. La hauteur de la droite à 5 mètres est identique dans les images gauche et droite car les images sont rectifiées. La distance en cm correspond à une distance au bord de route droit d'un point 3D arbitraire situé sur la roue avant droite du véhicule. Sa valeur indique le cap du véhicule. | (6) Image de V-disparité seuillée, dans laquelle on a détecté la position de l'obstacle par une ligne verticale. L'équation de la route dans le plan V-disparité est représentée par une ligne oblique qui fait un angle de 65° par rapport à l'horizontale dû à l'inclinaison de la caméra. La transformée de la route coupe "V" à la hauteur de l'horizon. L'intersection des droites, ordonnée de la ligne bleue, est représentée par un cercle gris (obstacle). | (7) Mesure du mouvement apparent du plan de la route estimé par une transformation affine et un filtrage de Kalman. Les paramètres affichés sont donc, les 3 rotation-translations approximées à l'instant T et les 3 rotation-translations estimées à l'instant T-1. Il est aussi affiché un pourcentage correspondant à la qualité de la détermination entre T-1 et T, à l'aide du facteur de corrélation (en %). Lorsque l'indice est en dessous de 30%, l'estimée à T-1 est remise à zéro. |
|
|
|
|
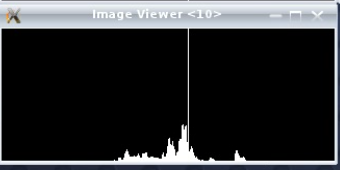
| (8) Image de U-disparité seuillée permettant la détection latérale. | (9) Algorithme de suppression de fond (background substraction) appliqué sur la caméra gauche entre l'image à T-1 et l'image à l'instant T, recalées par rapport au déplacement plan. Le résultat de l'opération de suppression est limité à la voie de circulation. C'est en fait l'image à l'instant T qui est "warpée" par la transformation projective inverse, dont les paramètres sont Tu, Tv et alpha. Ces 3 paramètres sont obtenus en vue de dessus, et correspondent dans la vue de face à Tx (latéral), Tz (longitudinal) et lambda (lacet), respectivement. L'image binaire de résultat permet donc de détecter le mouvement entre T-1 et T, d'obstacles potentiels situés au dessus du plan de la route. | (10) Transformation de Radon (histogramme projeté) selon l'axe V. | (11) Paramètres datés qui remontent des capteurs proprioceptifs. |
|
|||
| (12) Transformation de Radon (histogramme projeté) selon l'axe U. |

