Reconstruction du relief visible par disparité temporelle
________________________________________________________________________
Lorsque l'on veut déterminer le mouvement, il existe deux hypothèses simplificatrices. Soit la caméra est fixe, et la scène observée est en mouvement. Soit la caméra bouge, et la scène est statique. Dans le cas général, la caméra et la scène sont en mouvement, et il faut segmenter les éléments statiques et dynamiques de ce que l'on observe. Dans le cas présent la caméra est fixe, et elle observe la personne qui se situe devant l'ordinateur et qui bouge. Le but de l'expérimentation est de reconstruire le relief visible, par "disparité temporelle" ("monocular depth" en anglais).
 |
 |
| Image de référence | Image à apparier |
 |
| Mosaïque d'images |
Paramètres de la transformation projective :
Roulis (en degrés) Rz = -1.19°
Tangage (en degrés) Rx = -2.99°
Lacet (en degrés) Ry = 9.82°
Translation horizontale (en pixels) Tx = -159.2 pixels
Translation verticale (en pixels) Ty = -36.2 pixels
Translation en profondeur (en pixels) Tz = -2.1 pixels
Inclinaison horizontale (en degrés) Sx = 0.88°
Inclinaison verticale (en degrés) Sy = 0.33°
Inter-corrélation des images appariées = 80%
 |
 |
 |
| Localisation du visage dans l'espace | Disparité temporelle horizontale | Disparité temporelle verticale |
| |
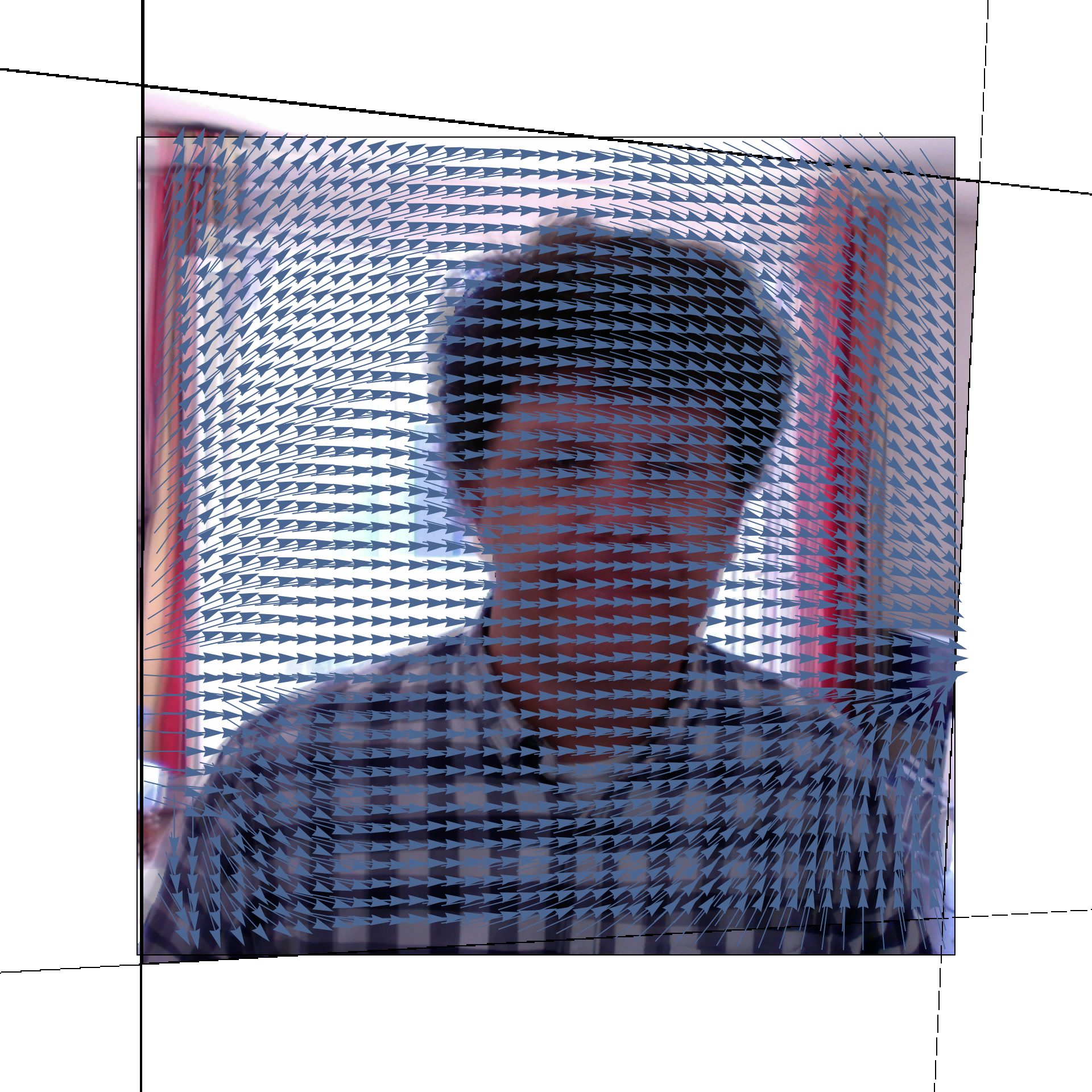
| Vidéo : utilisation du flot-optique (DIS)
pour la mesure de disparité temporelle |
|
|
| Vue en relief, reconstitué par disparité
temporelle horizontale |
C'est à dire que nous obtenons la profondeur (inversement proportionnelle à la disparité) par la mesure du flot-optique, avec une seule caméra, alors que cette mesure est faite classiquement par vision binoculaire (pour la disparité spatiale).
mailto:francois.le-coat@satie.ens-cachan.fr
Le 10/01/2024