{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Présentation générale du contenu vidéo de la démonstration.
SYSTÈME DE VISION
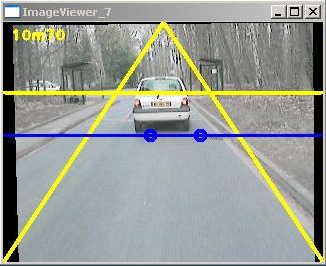
Notre système de vision embarqué reconstruit et affiche une vue synthétique aérienne (bird view) des obstacles potentiels dans la voie de circulation, au dessus du plan de la route et en fonction de la position de PICAR. L'horizon, les obstacles et les bords de route résultent d'un calcul dit "transformée de Hough" opéré dans l'espace des disparités stéréoscopiques. Cette fonctionnalité relativement restreinte s'inscrit dans notre conception multi-capteurs de la perception du véhicule.
Le contenu des images qui apparaîtront dans la démo est explicité par la rubrique "description des images".
SCÉNARIO
1ère partie: Contrôle en boucle ouverte par vision passive sur une séquence réelle, re-jeu du trajet LIMSI vers IEF (objectif du PPF-VARVIC)
Le système de
vision du véhicule exploite une séquence de
données
acquises dans le but d'expérimenter les algorithmes de
traitement de signal et d'image. Ces données sont issues des
capteur proprioceptifs (encodeur, gyromètre ...) et
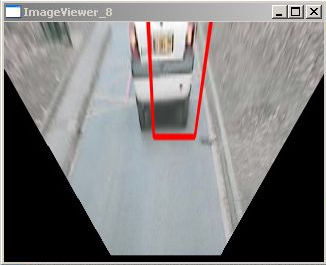
extéroceptifs (caméras). La vue de dessus (bird view)
qui apparaît d'abord montre le positionnement de l'obstacle sur
la route, sa distance longitudinale ainsi que le suivi latéral
du bord de route.
Sur l'intégralité de la séquence
rejouée, on constate des défauts, par exemple dans les
virages, qui seront simplement résolus en impliquant l'angle
de lacet (gyromètre) ou l'angle du volant (encodeur) dans une
commande avec filtrage temporel élémentaire. On note
que les 3 flots de données image de l'enregistrement sont
exploités à la volée. Les acquisitions sont
validées et les distances déterminées avec une
incertitude constatée de +/-10% par rapport à la
réalité des trajectoires. Un tel résultat
convient pour une conduite du véhicule à vitesse
raisonnable (#30Km/h).
2ème partie: Contrôle réel en boucle fermée par la vision associée aux capteurs proprioceptifs dans des situations simples (continuation du PPF-VARVIC)
PICAR
commence sa trajectoire à 20 mètres de l'obstacle et le
détecte en s'approchant.
Sans l'usage du frein, désactivé
pour l'occasion, PICAR stoppe sa course dans la zone des 5
mètres
grâce à une rétroaction contrôlée
par la vision
1ère étape) PICAR est piloté par un conducteur pour une phase d'apprentissage de la trajectoire. Celle-ci consiste simplement en une accélération puis décélération progressive à partir de (obstacle - 10 mètres), avec freinage final à (obstacle - 1 mètre)
2ème étape) PICAR s'arrête en interrompant la séquence précédente rejouée i.e. suite de consignes de vitesse, dès qu'un obstacle est détecté par la vision stéréoscopique à 5 mètres. Grâce au ralentissement progressif, PICAR étant déjà à faible vitesse, l'arrêt complet est obtenu sans freinage à (obstacle - 4 mètres). Le contrôle complètement automatique est attesté par les bras levés du conducteur.
3ème étape) PICAR stoppe sa trajectoire de manière autonome en donnant une consigne de vitesse constante, et en l'annulant totalement dès la détection visuelle de l'obstacle à 5 mètres: arrêt complet à (obstacle - 1 mètre). Le non interventionnisme stoïque du conducteur ne préjuge pas de sa grande prudence dont témoigne la main sur le poussoir d'arrêt d'urgence.
4ème étape) Les conditions expérimentales sont identiques aux précédentes et à très faible vitesse (<10 Km/h). Un piéton entre latéralement dans la zone critique et n'est pas détecté par la vision (il le sera par les proximètres avec arrêt brutal). Le piéton recule pour sortir de la zone aveugle de la stéréo. Il est trop peu encombrant compte tenu des paramètres actuels, il faut un deuxième piéton pour que la voiture stoppe.